Daftar isi
Praktikum Pesawat Atwood
Bab I. Pendahuluan
A. Latar Belakang
Apa yang menyebabkan sebuah dapat bergerak. Benda dikatakan bergerak ketika ada gaya yang di berikan sehingga gaya dapat dikatakan sesuatu yang menyebabkan sebuah benda bergerak lebih cepat. Gerak dibagi atas 2 yaitu gerak linaer dan gerak rotasi, gerak adalah gerak yang dilakukan secara lurus atau perpindahan lurus, sedangkan gerak rotasi adalah gerak yang bergerak secara mengelending.
Pada gerak translansi, berlaku hukum Newton I,II dan III. Hukum I Newton menyatakan bahwa setiap benda akan tetap diam atau tetap bergerak dengan laju dan arah yang tetap jika tidak ada gaya yang bekerja pada benda tersebut, tetapi ada suatu kejadian dimana benda yang bergerak dengan kecepatan konstan juga merupakan keadaan yang dinyatakan oleh hukum I Newton dimana pada saat ini kecepatannya constant, sehingga percepatannya sama dengan 0.
Untuk hukum II Newton, hukum II Newton menyatakan bahwa perceptaan yang dihasilkan oleh resultan gaya yang bekerja pada suatu benda berbanding lurus dengan resultan gaya, searah resultan gaya, dan berbanding terbalik dengan massa benda.
Untuk hukum III Newton,nhukum III Newton menyatakan bahwa jika bertama memberikan gaya pada benda kedua, benda kedua juga akan memberikan gaya yang sama dengan arah yang berlawanan. Gerak rotasi merupakan gerak suatu benda yang menempuh lintasan berupa lingkaran. Gerak rotasi yang terjadi pada suatu benda dapat menimbulkan adanya momen inersia. Momen inersia adalah ukuran kelembaman suatu benda yang berotasi / berputar terhadap porosnya. Momen inersia merupakan suatu besaran yang memperlihatkan tentang usaha suatu sistem benda untuk menentang gerak rotasinya.
Pada praktikum ini akan dilakukan percobaan untuk membuktikan keberlakuaan hukum-hukum translansi dan gerak rotasi, pada kegiatan ini juga berlaku GLB dan GLBB, dimana GLB adalah gerak lurus beraturan dimana pada keadaan ini kecepatan konstan dengan percepatan 0 sehingga gaya yang berlaku untuk GLB adalah hukum I Newton , sedangkan GLBB adalah geralk lurus bergerak beraturan dimana pada keadaan apa perubahan terahadap kecepatan tetapi percepatannya konstan, sehingga pada GLBB berlaku hukum II Newton. Kemusian untuk gerak rotasi akan di alami oleh kantrol. Untuk menmbuktikan hukum-hukum tersebut maka di adakan praktiukm ini dengan menggunakan pesawat atwood, alat yang mempermudah dalam mengetahui gayanya tersebut
B. Tujuan
- Mahasiswa mampu membuktikan keberlakuan hukum-hukum Newton untuk gerak translasi dan gerak rotasi.
- Menghitung momen kelembaman (inersia) katrol
Bab II. Kajian Pustaka
Hukum II Newton menyatakan : Percepatan yang dialami oleh sebuah benda besarnya berbanding lurus dengan besar resultan gaya yang bekerja pada benda itu, searah dengan arah gaya itu, dan berbanding terbalik dengan massa kelembamannya.

Kita dapat mempelajari hukum tersebut di atas pada percobaan kereta dinamika maupun pada percobaan pesawat Atwood. Pada percobaan kereta dinamika dapat dijelaskan sebagai berikut :

Gambar 1 Percobaan Kereta Dinamika
Perhatikan gambar 1 di atas, ketika kereta dinamika dilepaskan maka pola gerakan kereta dinamika dapat digambarkan melalui pita ticker timer. Dengan memvariasikan massa dan sudut kemiringan maka kita dapat mempelajari perilaku hukum I Newton pada persoalan ini.

Gambar 2 Pesawat Atwood
Percobaan dengan pesawat Atwood seperti pada gambar 2, bila massa silinder dan beban tambahan (M1+m) lebih besar daripada massa silinder M2, maka silinder M1 dan beban tambahan m akan bergerak dipercepat ke bawah sedangkan silinder M2 akan bergerak ke atas dengan percepatan yang sama besarnya. Hal itu akan menyebebkan katrol berotasi pada sumbu tetapnya. Pada tiap silinder berlaku hukum II Newton :

Sedangkan untuk katrolnya berlaku :

Dengan menjabarkan persamaan (2) dan (3) di atas kita dapat menurunkan persamaan untuk menghitung percepatan silinder, yaitu :

Dari persamaan (4) kita dapat menentukan momen inersia katrol.

Bab III. Metode Praktikum
A. Prosedur Percobaan
Kereta Dinamika
- Susun alat seperti pada gambar 1 (Anda dapat memulai dengan empat beban di atas kereta dinamika), untuk menghidupkan ticker timer gunakan power supply dengan beda potensial cukup 3 Volt AC (Max 6 Volt AC).
- Atur kemiringan landasan rel mulai dari 120. Pasang pita kertas pada penjepit pita di posisi belakang kereta dinamika. Pegang kereta dinamika pada posisi teratas. Lepaskan kereta dinamika bersamaan dengan menghidupkan ticker timer. Tangkap kereta dinamika pada saat pendorong-pegas kereta tepat menyentuh pembatas rel, jaga dengan hati-hati jangan sampai kereta terjatuh dan segera matikan ticker timer dengan memutus saklar penghubung. Amati jejak ketikan ticker timer pada pita kertas, bila baik tandailah pita dengan mencatat kemiringan dan massa beban pada pita lalu lakukan langkah berikutnya.
- Ulangi langkah 2 (untuk kemiringan yang sama) dengan beban yang berbeda-beda (ambil lima data untuk beban yang berbeda).
- Lakukan langkah 2 sampai 3 dengan pengurangan kemiringan hingga 50 (ambil lima data dengan massa yang sama).
- Ukur dan catatlah massa kereta dinamika, massa beban tambahan dari setiap data yang diambil.
Pesawat Atwood
Pertama : Menentukan momen Inersia katrol
- Ukur dan catat massa silinder M1, M2, beban tambahan m1 dan m2 serta massa katrol mk, dan jari-jari katrol (R).
- Atur sistem seperti pada gambar 2. tetapkan skala nol pesawat sebagai titik A dan tentukan letak pembatas berlubang sebagai titik B, dan catat jarak AB itu.
- Tambahkan beban (boleh m1 atau m2 atau (m1+m2)) pada M1 dan atur agar posisi awal tepat di A.
- Lepaskan pemegang M2 bersamaan dengan menghidupkan stopwatch. Catat waktu yang diperlukan untuk bergerak dari A ke B (tAB).
- Lakukan langkah 1 sampai 4 sebanyak lima kali dengan jarak AB yang berbeda-beda dengan beban yang konstan.
- Berdasarkan data yang Anda temukan, buatlah grafik SAB = f (tAB2).
Kedua : Mempelajari perilaku hukum II Newton
- Letakkan pembatas C di bawah titik B. Atur jarak AB 80 cm dan jarak BCmin 20 cm. (Ket: angka-angka ini hanya untuk memudahkan).
- Tambahkan beban (m1+m2) pada M1 lalu atur agar posisi awal tepat di A, lepaskan pemegang M2 sehingga dapat bergerak naik, M1 turun melewati B hingga ke C sedangkan m1 tertahan di B. Ukur dan catat waktu yang diperlukan untuk bergerak dari A ke B (tAB) dan dari B ke C (tBC).
- Lakukan langkah 8 dan 9 lima kali dengan jarak AC tetap sedangkan jarak AB dan BC berbeda-beda, melalui perubahan posisi B.
- Berdasarkan data yang diperoleh buatlah grafik SAB = f(tAB2) dan grafik SBC = f(tBC).
Bab IV. Hasil dan Pembahasan
Data Hasil Percobaan
Tabel 1. Keadaan Laboratorium
| Keadaan Ruangan | Awal Praktikum | Akhir Praktikum |
| Suhu (0C) | 27 ± 0,25 | 27,5 ± 0,25 |
| Tekanan (cmHg) | 68,5 ± 0,05 | 68,5 ± 0,05 |
Eksperimen Kereta Dinamika
Tabel 2. Perubahan Sudut Kemiringan
| Pengukuran ke- | (m ± 0,005) gram | (θ ± 0,5)o |
| 1 | 1502,38 | 11 |
| 2 | 10 | |
| 3 | 9 | |
| 4 | 8 | |
| 5 | 7 |
Tabel 3. Perubahan Massa Beban
| Pengukuran ke- | (m ± 0,005) gram | (θ ± 0,5)o |
| 1 | 1502,38 | 12 |
| 2 | 1253,98 | |
| 3 | 1004,82 | |
| 4 | 756,32 | |
| 5 | 507,72 |
Eksperimen Pesawat Atwood
Mkatrol = (71,54± 0,005) gram
M1 = (71,52± 0,005) gram
M2 = (70,82± 0,005) gram
m1 = (4,01± 0,005) gram
m2 = (4,01± 0,005) gram
Rkatrol = (6± 0,05) cm
Tabel 4. Pengukuran Percobaan Pertama
| Pengukuran ke- | (SAB ± 0,05) cm | (tAB ± 0,005) s |
| 1 | 30 | 0,94 |
| 2 | 35 | 1,06 |
| 3 | 40 | 1,22 |
| 4 | 45 | 1,32 |
| 5 | 50 | 1,38 |
Tabel 5. Pengukuran Percobaan Kedua
| Pengukuran ke- | (SAB ± 0,05) cm | (SBC ± 0,05) cm | (tAB ± 0,005) s | (tBC ± 0,005) s |
| 1 | 80 | 20 | 1,99 | 0,27 |
| 2 | 75 | 25 | 1,72 | 0,33 |
| 3 | 70 | 30 | 1,64 | 0,34 |
| 4 | 65 | 35 | 1,48 | 0,44 |
| 5 | 60 | 40 | 1,15 | 0,50 |
Pengolahan Data
T = 1/f
Dik : f = 50 Hertz
T = 1/f = 1/50 = 0,02 s
tn = T x jumlah ketukan
t1 = 0,02 . 5 = 0,1 s
t2 = 0,02 . 10 = 0,2 s
t3 = 0,02 . 15 = 0,3 s
t4 = 0,02 . 20 = 0,4 s
t5 = 0,02 . 25 = 0,5 s
Eksperimen Kereta Dinamika untuk Kemiringan yang Sama (120)
Massa kereta+ 4 beban
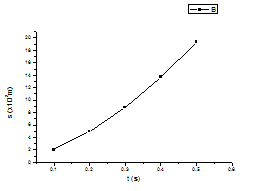
Tabel 6. Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v (m/s) |
| 1 | 4,3 | 0,1 | 43 |
| 2 | 10,3 | 0,2 | 60 |
| 3 | 18,0 | 0,3 | 77 |
| 4 | 27,9 | 0,4 | 99 |
| 5 | 39,0 | 0,5 | 111 |
Grafik 1
Grafik s=f(t)

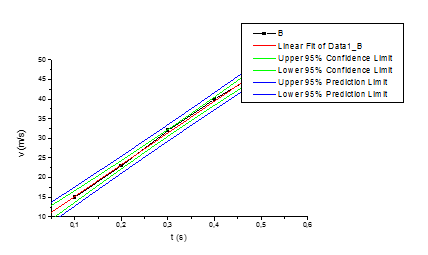
Grafik v=f(t)

Parameter Value Error
————————————————————
A 25,5 2,53311
B 175 7,63763
————————————————————
R SD N P
————————————————————
0,99716 2,41523 5 1,8208E-4
————————————————————

Massa kereta+ 3 beban
Tabel 7
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 3,9 | 0,1 | 39 |
| 2 | 9,6 | 0,2 | 57 |
| 3 | 17,0 | 0,3 | 74 |
| 4 | 26,4 | 0,4 | 94 |
| 5 | 37,3 | 0,5 | 109 |
Grafik 3
Grafik s=f(t)

Grafik 4
Grafik v=f(t)

Parameter Value Error
————————————————————
A 21,5 1,25565
B 177 3,78594
————————————————————
R SD N P
————————————————————
0,99931 1,19722 5 <0.0001
————————————————————

Massa kereta+2 beban
Tabel 8
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 4,0 | 0,1 | 40 |
| 2 | 9,9 | 0,2 | 59 |
| 3 | 17,4 | 0,3 | 75 |
| 4 | 26,8 | 0,4 | 94 |
| 5 | 37,8 | 0,5 | 110 |
Grafik s=f(t)
Grafik 5

Grafik 6
Grafik v=f(t)

Parameter Value Error
————————————————————
A 23,1 0,99499
B 175 3
————————————————————
R SD N P
————————————————————
0,99956 0,94868 5 <0.0001
————————————————————

Massa kereta+ 1 beban
Tabel 9
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 4,3 | 0,1 | 43 |
| 2 | 10,5 | 0,2 | 62 |
| 3 | 18,5 | 0,3 | 80 |
| 4 | 28,0 | 0,4 | 95 |
| 5 | 39,1 | 0,5 | 111 |
Grafik s=f(t)
Grafik 7

Grafik 8
Grafik v=f(t)

Parameter Value Error
————————————————————
A 27,5 1,56738
B 169 4,72582
————————————————————
R SD N P
————————————————————
0,99883 1,49443 5 <0.0001
————————————————————

Massa kereta
Tabel 10
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 4,0 | 0,1 | 40 |
| 2 | 9,8 | 0,2 | 58 |
| 3 | 17,0 | 0,3 | 72 |
| 4 | 26,1 | 0,4 | 91 |
| 5 | 36,8 | 0,5 | 107 |
Grafik 9
Grafik s=f(t)

Grafik 10
Grafik v=f(t)

Parameter Value Error
————————————————————
A 23,5 1,25565
B 167 3,78594
————————————————————
R SD N P
————————————————————
0,99923 1,19722 5 <0.0001
————————————————————

Eksperimen Kereta Dinamika untuk Massa yang Sama
Kemiringan 110
Tabel 11
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 2,2 | 0,1 | 22 |
| 2 | 6,0 | 0,2 | 38 |
| 3 | 11,1 | 0,3 | 51 |
| 4 | 17,6 | 0,4 | 65 |
| 5 | 25,8 | 0,5 | 82 |
Grafik 11
Grafik s=f(t)

Grafik 12
Grafik v=f(t)

Parameter Value Error
————————————————————
A 8,7 1,19583
B 161 3,60555
————————————————————
R SD N P
————————————————————
0,99925 1,14018 5 <0.0001
————————————————————

Kemiringan 100
Tabel 12
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 2,2 | 0,1 | 22 |
| 2 | 6,0 | 0,2 | 38 |
| 3 | 11,1 | 0,3 | 51 |
| 4 | 17,6 | 0,4 | 65 |
| 5 | 25,8 | 0,5 | 82 |
Grafik 13
Grafik s=f(t)

Grafik 14
Grafik v=f(t)

Parameter Value Error
————————————————————
A 7,5 1,25565
B 147 3,78594
————————————————————
R SD N P
————————————————————
0,99901 1,19722 5 <0.0001
————————————————————

Kemiringan 90
Tabel 13
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 2,0 | 0,1 | 20 |
| 2 | 5,3 | 0,2 | 33 |
| 3 | 9,8 | 0,3 | 45 |
| 4 | 15,5 | 0,4 | 57 |
| 5 | 22,4 | 0,5 | 69 |
Grafik 15
Grafik s=f(t)

Grafik 16
Grafik v=f(t)

Parameter Value Error
————————————————————
A 8,2 0,38297
B 122 1,1547
————————————————————
R SD N P
————————————————————
0,99987 0,36515 5 <0.0001
————————————————————

Kemiringan 80
Tabel 14
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 2,0 | 0,1 | 20 |
| 2 | 5,0 | 0,2 | 30 |
| 3 | 8,8 | 0,3 | 38 |
| 4 | 13,7 | 0,4 | 49 |
| 5 | 19,4 | 0,5 | 57 |
Grafik 17
Grafik s=f(t)
Grafik 18
Grafik v=f(t)

Parameter Value Error
————————————————————
A 10,9 0,83467
B 93 2,51661
————————————————————
R SD N P
————————————————————
0,9989 0,79582 5 <0.0001
————————————————————

Kemiringan 70
Tabel 15
Data Pembuatan Grafik v=f(t)
| Ketikan ke- | (s±0,05) x10-2 m | (t±0,005) s | v m/s |
| 1 | 1,5 | 0,1 | 15 |
| 2 | 3,8 | 0,2 | 23 |
| 3 | 7,0 | 0,3 | 32 |
| 4 | 11,0 | 0,4 | 40 |
| 5 | 15,7 | 0,5 | 47 |
Grafik 19
Grafik s=f(t)

Grafik 20
Grafik v=f(t)
Parameter Value Error
————————————————————
A 7,1 0,63509
B 81 1,91485
————————————————————
R SD N P
————————————————————
0,99916 0,60553 5 <0.0001
————————————————————

Tabel 16
Pengolahan Data Percepatan dengan Kemiringan Konstan
| No. | a (m/s2) | ||
| 1 | 1,66 | 0,01 | 0,0001 |
| 2 | 1,66 | 0,01 | 0,0001 |
| 3 | 1,70 | 0,05 | 0,0025 |
| 4 | 1,62 | 0,03 | 0,0009 |
| 5 | 1,62 | 0,03 | 0,0009 |
| ∑ | 8,26 | 0,0045 |

Tabel 17
Data Pembuatan Grafik ∑F=f(m)
| No. | (m±0,005) kg | a (m/s2) | F (N) |
| 1 | 1,50 | 1,65 | 2,47 |
| 2 | 1,25 | 1,65 | 2,06 |
| 3 | 1,00 | 1,65 | 1,65 |
| 4 | 0,76 | 1,65 | 1,25 |
| 5 | 0,51 | 1,65 | 0,84 |
Grafik 21
Grafik ∑F= f(m)

Tabel 18. Data Pembuatan Grafik ∑F=f(a)
| No. | (m±0,005) kg | a (m/s2) | F (N) |
| 1 | 1,50 | 1,60 | 2,40 |
| 2 | 1,50 | 1,44 | 2,16 |
| 3 | 1,50 | 1,23 | 1,84 |
| 4 | 1,50 | 0,89 | 1,33 |
| 5 | 1,50 | 0,78 | 1,17 |
Grafik 22
Grafik ∑F=f(a)

Tabel 19. Data Pembuatan Grafik SAB=f(tAB2)
| No. | (SAB±0,05) x10-2m | (tAB±0,005) s | (tAB±0,05)2 s |
| 1 | 30 | 1,65 | 2,72 |
| 2 | 40 | 1,98 | 3,92 |
| 3 | 50 | 2,26 | 5,10 |
| 4 | 60 | 2,41 | 5,81 |
| 5 | 70 | 2,60 | 6,80 |
Grafik 23
Grafik SAB=f(tAB2)

Dari Persamaan (5)

Selain itu, momen inersia juga dapat dihitung melalui persamaan I = 1/2 mR^2

Tabel 20. Data Pembuatan Grafik SAB=f(tAB)
| Pengukuran ke- | (SAB ± 0,05) cm | (tAB ± 0,005) s |
| 1 | 80 | 2,38 |
| 2 | 70 | 2,15 |
| 3 | 60 | 2,08 |
| 4 | 50 | 1,96 |
| 5 | 40 | 1,65 |
Grafik 24
Grafik SAB=f(tAB)

Tabel 21. Data Pembuatan Grafik SBC=f(tBC)
| Pengukuran ke- | (SBC ± 0,05) cm | (tBC ± 0,005) s |
| 1 | 20 | 0,35 |
| 2 | 30 | 0,66 |
| 3 | 40 | 0,85 |
| 4 | 50 | 1,14 |
| 5 | 60 | 1,49 |
Grafik 25
Grafik SAB=f(tAB)

Analisis Data
Eksperimen Kereta Dinamika :
Grafik v=f(t) yang dibuat dari grafik s=f(t) sama dengan grafik yang dibuat dengan menggunakan potongan pita ticker timer. Karena ketukan pada pita menunjukkan kecepatan pada saat tertentu. Dari grafik v=f(t) dapat dicari harga percepatan. Tabel 22 menunjukkan percepatan saat sudut dibuat konstan.
Tabel 22. Hasil Pengolahan Data Percepatan dengan Massa Tidak Konstan
| No. | (m±0,005)gram | a (m/s2) secara origin | a (m/s2) secara manual |
| 1 | 1502,38 | 1,75 ± 0,07 | 1,66 ± 0,48 |
| 2 | 1253,98 | 1,77 ± 0,03 | 1,66 ± 0,41 |
| 3 | 1004,82 | 1,75 ± 0,03 | 1,70 ± 0,38 |
| 4 | 756,32 | 1,69 ± 0,04 | 1,62 ± 0,39 |
| 5 | 507,72 | 1,67 ± 0,03 | 1,62 ± 0,40 |
Dari hasil yang diperoleh, jika massa yang digunakan tidak konstan, percepatannya cenderung akan konstan. Hal ini sesuai dengan teori di mana penambahan atau pengurangan massa tidak akan berpengaruh pada percepatan benda. Dari hasil tersebut terlihat beberapa perbedaan antara data yang satu dengan data lainnya. Namun, karena perbedaannya tidak signifikan dapat diasumsikan percepatan akan sama di setiap pengukuran.
Tabel 23. Hasil Pengolahan Data Percepatan dengan Sudut Kemiringan Tidak Konstan
| No. | (θ±0,05)o | a (m/s2) secara origin | a (m/s2) secara manual |
| 1 | 11 | 1,61 ± 0,03 | 1,60 ± 0,39 |
| 2 | 10 | 1,47 ± 0,03 | 1,44 ± 0,41 |
| 3 | 9 | 1,22 ± 0,01 | 1,23 ± 0,41 |
| 4 | 8 | 0,93 ± 0,02 | 0,89 ± 0,31 |
| 5 | 7 | 0,81 ± 0,01 | 0,78 ± 0,31 |
Dari hasil yang diperoleh ternyata sudut kemiringan rel sangat berpengaruh pada percepatan kereta dinamika. Semakin besar sudut kemiringan maka akan semakin besar pula percepatannya, dan demikian sebaliknya. Hal ini dapat dibuktikan dengan hukum II Newton :
∑F = m.a
mg sinθ – fg = m.a
mg sin θ – µk mg cos θ = m.a
mg (sin θ – µk cos θ) = m.a
a = g (sin θ – µk cos θ)
Dari persamaan tersebut, tampak jelas bahwa percepatan dapat dipengaruhi oleh sudut namun tidak dengan massa.
Untuk kemiringan yang konstan dapat dibuat grafik ∑F=f(m) dan untuk massa yang konstan dapat dibuat grafik ∑F=f(a). Berdasarkan hasil pengolahan data yang diperoleh, Semakin besar massa yang digunakan, maka semakin besar pula jumlah gaya yang dihasilkan. Dari hasil pengolahan grafik, massa berbanding lurus dengan jumlah gayanya.
Untuk grafik , Jumlah gaya yang dihasilkan berbanding lurus dengan percepatan gerak bendanya. Dengan kata lain, semakin besar percepatan gerak suatu benda, maka semakin besar pula Jumlah gaya ( yang dihasilkannya.
Dalam hasil pengolahan data terdapat beberapa kesalahan. Berikut kesalahan-kesalahan yang mungkin terjadi saat eksperimen :
- Kurang ketelitian dalam mengukur
- Hasil ketikan ticker timer yang tidak lurus
- Kesalahan pembuatan grafik
- Pembulatan angka penting pada pengolahan data
Eksperimen Pesawat Atwood
Pada percobaan pertama, kita dapat membuat grafik SAB=f(tAB2). Dari grafik tersebut kita dapat menghitung percepatan sistem. Percepatan yang diperoleh adalah a = (0,19 ± 0,08) m/s2 . Percepatan tersebut dapat digunakan untuk menghitung momen inersia katrol dimana

Dari persamaan tersebut diperoleh momen inersia sebesar I = 0,09 x 10-3 kgm2. Kita juga dapat menentukan momen inersia dengan menggunakan persamaan I = 1/2 mR2 dan diperoleh I = 0,13 x 10-3 kgm2.
Dari percobaan kedua, dapat dibuat grafik SAB=f(tAB) dan SBC=f(tBC). Gerakan pada silinder di lintasan dari titik A ke titik B menyebabkan benda bergerak lurus berubah beraturan (GLBB), sedangkan gerakan pada lintasan dari titik B ke titik C menyebabkan benda bergerak lurus beraturan (GLB) hal tersebut terjadi karena massa di sisi kiri dan kanan hampir sama sehingga benda bergerak lurus beraturan (GLB). Dari data yang diperoleh, dapat disimpulkan jika suatu benda bergerak lurus berubah beraturan (GLBB), maka grafik S = f (t) berbentuk grafik eksponensial dan jika sebuah benda bergerak lurus beraturan (GLB) grafik S = f (t) akan membentuk sebuah garis linier. Dalam eksperimen kali ini, untuk grafik S = f(t) dalam arah GLBB maupun grafik dalam arah GLB, grafik tidak menunjukan bahwa gerakan tersebut menunjukan gerak lurus beraturan (GLB) atau gerak lurus berubah beraturan (GLBB) melainkan hanya mendekati saja.
Faktor-faktor yang menyebabkan hal-hal tersebut dapat terjadi, antara lain :
- Massa tali tidak dapat diabaikan
- Tali berpilin ( berotasi / berputar )
- Terjadi gesekan antara tali dengan katrol yang sulit diabaikan
- Sifat tali yang elastis
- Poros katrol tidak linear / smooth ( halus )
- Kesalahan dalam menentukan waktu
Bab V. Penutup
A. Kesimpulan
- Dari Eksperimen Kereta Dinamika kita dapat mempelajari Hukum II Newton dimana ∑F=m.a. Hal itu dapat dibuktikan dengan grafik ∑F= f(m) dan grafik ∑F= f(a)
- Berdasarkan grafik ∑F=f(m) didapat bahwa jumlah gaya (∑F) berbanding lurus dengan massa benda ( untuk sudut kemiringan yang tetap )
- Berdasarkan grafik ∑F=f(a) didapat bahwa jumlah gaya (∑F) berbanding lurus dengan percepatan gerakannya ( untuk massa yang tetap )
- Jadi, dapat disimpulkan bahwa jumlah gaya-gaya (∑F) yang bekerja pada kereta dinamika sangat bergantung atau dipengaruhi oleh massa dan juga sudut atau kemiringannya.
Dari Eksperimen Pesawat Atwood
- Dengan menggunakan persamaan ,
maka momen inersia yang diperoleh adalah I = 0,09 x 10-3 kgm2, sedangkan dengan melalui persamaan matematis (I=1/2 mR2), maka momen inersia yang diperoleh adalah I = 0,13 x 10-3 kgm2. - Berdasarkan grafik yang diperoleh, gerakan yang terjadi pada lintasan dari titik A ke B adalah Gerak Lurus Berubah Beraturan (GLBB) dan gerakan pada lintasan dari titik B ke C adalah Gerak Lurus Beraturan (GLB).
{kind=link}
B. Saran
Pada laporan ini masih terdapat banyak kekurangan. Oleh karena itu, ada beberapa saran untuk melakukan ekpeimen ini supaya terjadinya kesalahan dapat diminimalisir, diantaranya :
- Pilihlah pita kertas yang baik,
- Pilih karbon yang baik agar jejak ketikan dapat terlihat dengan jelas,
- Jaga kereta dinamika saat eksperimen berlangsung jangan sampai terjatuh atau keluar dari lintasan
- Dalam ekperimen pesawat atwood, Pada percobaan pesawat atwood, tali jangan sampai terpelintir sedikit pun dan usahakan posisi kedua massa setimbang
- Lebih teliti dalam melakukan pengukuran
- Pahami prosedur yang ada dengan baik
Daftar Pustaka
Tipler A Paul,1998,Physics for Scientists and Engineers,Third Edition,hal 91-93,Erlangga, Jakarta
Halliday dan Resnick,1978,Fisika,Third Edition jilid 1(Terjemahan Pantur Silaban Ph.D), hal 54-61,355,Erlangga,Jakarta.
M.Nelkon dan P.Parker,1975,Advanced Level Physics,pp 1-13,Third Edition,Heinemann Educational Books,London.
http://fpmipa.upi.edu/kuliah/mod/forum/discuss.php?d=948
Leave a Reply
You must be logged in to post a comment.